Système J.H.
.
Le système J.H. (pour Jeumont-Heidmann) est un équipement de démarrage à résistances pour le matériel à moteurs à courant continu.
Sommaire :
1. Historique
2. Principe de la commande
3. Constitution du JH
4. Le circuit de traction aux différents crans
5. Circuit de freinage
1. Historique |
Le matériel ferroviaire français fonctionnant par moteurs à courant continu est jusqu’alors majoritairement équipé de rhéostats de démarrage, système permettant de faire varier le courant circulant dans le moteur.
Les moteurs série à courant continu ayant une trop faible résistance électrique au démarrage, des moyens ont dû être développés afin de limiter ce courant, puis l’augmenter au fur et à mesure que la vitesse augmente.
Le matériel roulant à courant continu utilisant le principe du rhéostat emploie plusieurs procédés afin d’atteindre la puissance électrique souhaitée. Le système électromécanique J.H. est constitué d’un arbre à cames ouvrant et fermant mécaniquement les contacteurs permettant d’éliminer progressivement les résistances placées en série dans le circuit de traction.
- élimination des résistances ;
- shuntage des inducteurs ;
- couplage traction freinage ;
- inversion du sens de marche.

2. Principe de la commande |
Le conducteur dispose en loge de conduite d’un manipulateur de traction/freinage comprenant notamment 5 crans de traction T1 à T5. Lorsque le conducteur commande la traction, il met généralement le manipulateur directement au cran T5. Les trois J.H. d’une rames (un par motrice, commun pour les 2 bogies moteur), de leur côté, disposent de 27 crans, qui montent progressivement à un rythme défini et synchronisé, grâce à un système ampèremétrique :
- progressivement : chacun des 27 crans des J.H. ne passe que lorsque l’intensité redescend à une certaine valeur, évitant les surintensités et donnant une accélération progressive ;
- synchronisés : les 3 J.H. se synchronisent avec le J.H. montant le moins vite (même si les moteurs sont identiques, chaque moteur n’accélère pas de la même façon) afin d’unifier l’effort de traction entre les 3 motrices de la rame, évitant ainsi les à-coups et jeux dans les attelages.
Le conducteur peut dans certains cas (comme un effort de traction du train insuffisant, suite à la synchronisation sur un J.H. un peu « faible ») désactiver de lui-même la synchronisation, afin que chaque motrice accélère à son maximum. Il dispose pour cela d’un commutateur (IST), on dit alors que le J.H. monte à la « volée ».

3. Constitution du JH |

Il est constitué des éléments suivants :
- un arbre à cames sur lequel sont fixées autant de cames de formes différentes qu’il y a de contacteurs à commander. Il comporte à ses extrémités :
- un plateau crénelé ;
- un servomoteur électrique (SME) : en tournant, l’axe d’entraînement du SME s’engage dans une rainure du plateau crénelé et entraîne l’arbre à cames d’une valeur correspondant au déplacement d’une dent. Un verrou immobilise le plateau à chaque fin de tour du SME ;
- une roue dentée.
- un cylindre d’asservissement entraîné par l’arbre à cames : il contrôle les divers mouvements du SME et comporte des segments venant en contact avec des doigts fixes ;
- un cylindre d’inversion qui change les sens du courant dans les induits des moteurs de traction. Il se compose d’un cylindre sur lequel sont fixées 4 cames agissant sur des contacteurs, il est commandé par l’arbre à cames ;
- un combinateur traction (T) freinage (F) qui permet de réaliser en fonction de sa position T ou F la commande des moteurs en traction ou en freinage électrique. Il est entraîné par le cylindre d’asservissement.
- Lorsque le manipulateur est en position de traction ou au neutre alors que la vitesse du train est inférieure à 12 km/h, le combinateur est en position T ;
- Lorsque le manipulateur est sur une position de freinage ou au neutre alors que la vitesse est supérieure à 12 km/h, le combinateur est en position F.
- Lorsque le manipulateur est en position de traction ou au neutre alors que la vitesse du train est inférieure à 12 km/h, le combinateur est en position T ;

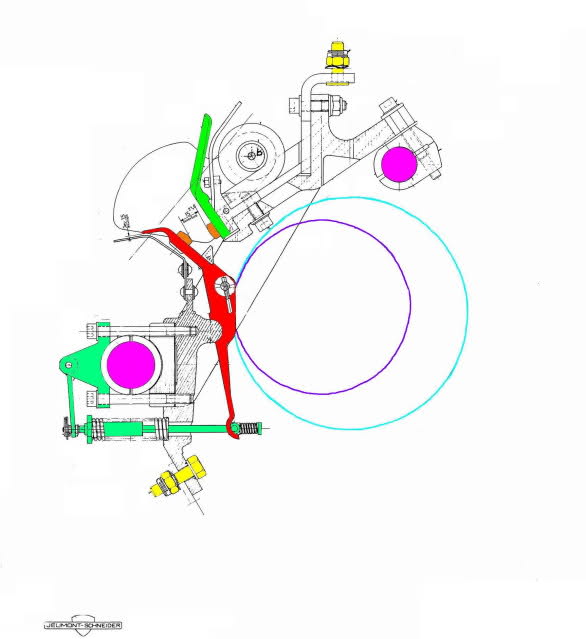
En orange : les contacteurs du J.H. recouverts par leurs boites de soufflage.
En rouge : le combinateur de traction / freinage et d’inversion de sens de marche.
En violet : les mini-contacts du combinateur en basse tension.
En bleu : le servo-moteur électrique (SME).
En mauve : l’arbre à cames.
En vert : le plateau crénelé.
En violet : les barreaux isolants de fixation du contacteur.
En rouge : le contact mobile monté sur une coquille en demi-lune.
En vert fluo : le contact fixe.
En vert : le rappel par ressort du contact mobile.
En cuivre : les pastilles en cuivre des contacts.
En bleu : la came avec en mauve la différence d’épaisseur dans la came pour l’ouverture ou la fermeture du contact.

| 3.1. Le servomoteur SME : |

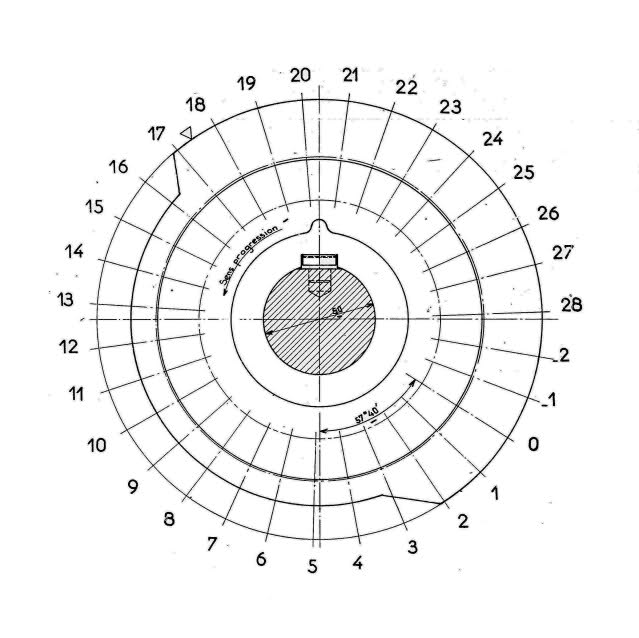
Le SME fonctionne par cran. Il fait tourner un axe, cran par cran, sur lequel sont fixées les cames qui font s’ouvrir ou se fermer des contacts électriques : on élimine ou rajoute des alors résistances.
Par exemple (sur un MF67 D) :
- Neutre : cran 0 ;
- En T1 (marqueur de cran de traction dans la loge), grâce au SME, le J.H. monte jusqu’au cran 3. Seul un contact se ferme, on élimine donc peu de résistance, les moteurs de traction sont en série : le train avance lentement ;
- En T5, le J.H. monte au cran 27, les résistances sont toutes éliminées, les moteurs passent en parallèle : on obtient la puissance maximum.

| 3.2. Le combinateur Traction/Freinage (T/F) |
- il permet le contrôle de l’utilisation des moteurs en traction ou en freinage, en séparant efficacement ces deux fonctions ;
- il dispose le combinateur T/F en position traction quand le manipulateur est, soit sur l’un des crans T1 à T5, soit sur le cran N (neutre), si la vitesse est inférieure à 12 km/h ;
- il dispose le combinateur T/F en position freinage quand le manipulateur est en N ou F1 à F6 (crans de freinage sur le pupitre de loge), si la vitesse est supérieure à 12 km/h.
| 3.3. Le combinateur d’inversion |
- elle dispose ou maintient le combinateur d’inversion pour la marche AVANT ou ARRIÈRE par le commutateur VR (contact en loge pour l’inversion du sens de marche) ;
- elle provoque l’ouverture du disjoncteur d’équipement traction (DET) lorsque le changement de marche est commandé et d’une manière générale, elle s’oppose à la fermeture du DET tant que l’inverseur n’est pas positionné pour la marche correspondante ;
- elle interdit le changement de marche tant que la vitesse du train est supérieure à 1,5 km/h.
4. Le circuit de traction aux différents crans |
Les différents crans de traction sur le pupitre de loge T1 à T5 sont réalisés par le combinateur J.H.. Chaque motrice possède son propre combinateur de démarrage commun à ses 2 bogies moteur, composé de 27 positions actives, numérotées de 1 à 27, et obtenues grâce au servomoteur. Ces 5 positions réalisent les différents circuits nécessaires pour obtenir le « câblage » suivant des moteurs :
- Cran T1, positions 1 à 3 du JH : « cran manœuvre » : les moteurs sont couplés en série, avec interposition d’une résistance totale de 6 ohms. Les inducteurs ne sont pas shuntés.
- Cran T2, positions 4 à 13 du JH : « cran série plein champ » : les moteurs, toujours couplés en série, n’ont plus aucune résistance en série. Les inducteurs ne sont toujours pas shuntés.
- Cran T3, position 14 du JH : « cran série champ réduit » : le shuntage des inducteurs est provoqué par la fermeture successive des contacteurs de shuntage.
- Cran T4, positions 15 à 26 du JH : « cran parallèle plein champ » : le shuntage est d’abord interrompu, puis le changement de couplage a lieu. Les résistances mises en série sur chaque moteur sont progressivement éliminées. Les moteurs couplés en parallèle n’ont plus aucune résistance en série, leurs inducteurs ne sont pas shuntés.
- Cran T5, position 27 du JH : « cran parallèle champ réduit » : le shuntage des inducteurs est provoqué par la fermeture successive des contacteurs de shuntage.
⇒ Si le conducteur se positionne sur le cran T2, le JH montera progressivement jusqu’à la position 13 maximum, les moteurs seront alors en « série plein champs ».
Outre ces 27 positions, il existe 4 autres positions :
- Position 0 : position neutre ;
- Position 28 : position de sécurité ;
- Position -1 : position de l’inverseur servant au passage du sens avant/arrière ;
- Position -2 : position de l’inverseur servant uniquement aux essais.
5. Circuit de freinage |
- Couplage des inducteurs : les moteurs sont alors utilisés en génératrices à excitation séparée. Les inducteurs sont couplés en série et alimentés par un pont de diodes qui redresse le courant alternatif fourni par la génératrice.
- Commande du J.H. en freinage : la position du J.H. donc pas asservie, en freinage, à celle du manipulateur, mais dépend uniquement de la vitesse de la rame et du courant inducteur des moteurs, ces informations sont traitées par un bloc électronique (RE) qui commande la progression du J.H. en conséquence.
- Asservissement du couple : le cran de freinage demandé (F1 à F6) est converti en consigne de couple par le bloc RE, dont le rôle essentiel est de commander ensuite l’excitation de la génératrice GAA de façon à lui faire débiter dans les inducteurs le courant nécessaire, pour que les moteurs exercent le couple demandé.
- Conjugaison du frein électrique et pneumatique : lorsque que le vitesse décroit au-delà d’une certaine valeur, les moteurs ne peuvent plus exercer le couple demandé malgré un courant inducteur très important. L’effort est alors complété par le freinage pneumatique.
⇒ Karodaxo / Matériel MF67 / Système J.H.
Accès rapide aux chapitres du « Matériel MF67 » : Généralités / Études et marchés MF65 / Système J.H. / Les différentes séries du MF67 / Matériels hors séries, prototypes et d’essais / Le MF67 ligne par ligne / Liste du matériel / Les trains de formation / Les modifications et les rénovations / Événements particuliers / Voitures sauvegardées / Publications et objets dérivés